In that article, I described some properties of Thomae’s function\(f\). Namely:
The function is discontinuous on \(\mathbb{Q}\).
Continuous on \(\mathbb{R} \setminus \mathbb{Q}\).
Its right-sided and left-sided limits vanish at all points.
Let’s modify \(f\) to get function \(g\) defined as follow:
\[g:
\left|\begin{array}{lrl}
\mathbb{R} & \longrightarrow & \mathbb{R} \\
x & \longmapsto & 0 \text{ if } x \in \mathbb{R} \setminus \mathbb{Q} \\
\frac{p}{q} & \longmapsto & q \text{ if } \frac{p}{q} \text{ in lowest terms and } q > 0
\end{array}\right.\] \(f\) and \(g\) both vanish on the set of irrational numbers, while on the set of rational numbers, \(g\) is equal to the reciprocal of \(f\). We now consider an open subset \(O \subset \mathbb{R}\) and \(x \in O\). As \(f\) right-sided and left-sided limits vanish at all points, we have \(\lim\limits_{n \to +\infty} f(x_n) = 0\) for all sequence \((x_n)\) of rational numbers converging to \(x\) (and such a sequence exists as the rational numbers are everywhere dense in the reals). Hence \(\lim\limits_{n \to +\infty} g(x_n) = + \infty\) as \(f\) is positive.
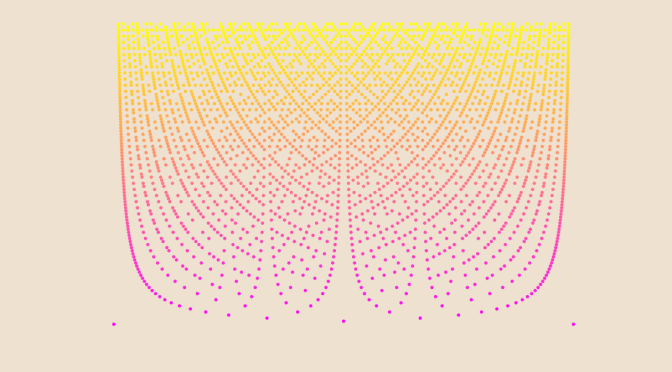
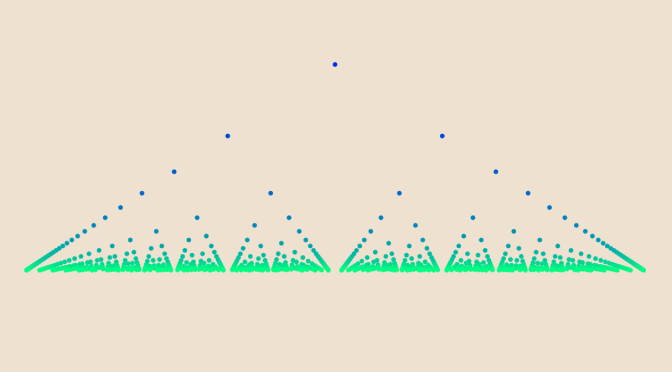
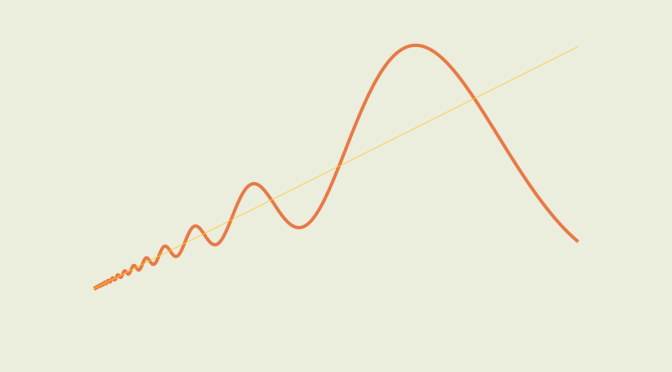
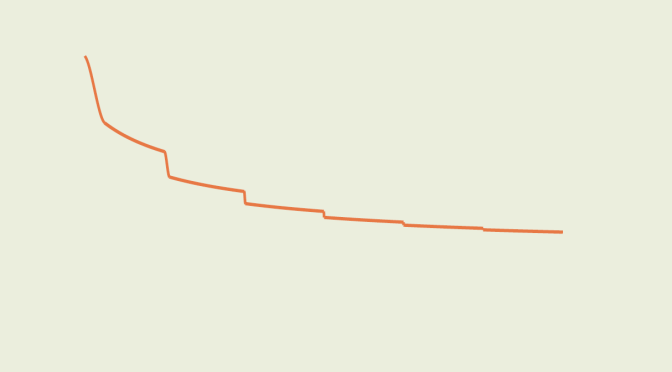
We can conclude that \(g\) is nowhere locally bounded. The picture of the article is a plot of function \(g\) on the rational numbers \(r = \frac{p}{q}\) in lowest terms for \(0 < r < 1\) and \(q \le 50\).
Let’s discover the beauties of Thomae’s function also named the popcorn function, the raindrop function or the modified Dirichlet function.
Thomae’s function is a real-valued function defined as:
\[f:
\left|\begin{array}{lrl}
\mathbb{R} & \longrightarrow & \mathbb{R} \\
x & \longmapsto & 0 \text{ if } x \in \mathbb{R} \setminus \mathbb{Q} \\
\frac{p}{q} & \longmapsto & \frac{1}{q} \text{ if } \frac{p}{q} \text{ in lowest terms and } q > 0
\end{array}\right.\]
\(f\) is periodic with period \(1\)
This is easy to prove as for \(x \in \mathbb{R} \setminus \mathbb{Q}\) we also have \(x+1 \in \mathbb{R} \setminus \mathbb{Q}\) and therefore \(f(x+1)=f(x)=0\). While for \(y=\frac{p}{q} \in \mathbb{Q}\) in lowest terms, \(y+1=\frac{p+q}{q}\) is also in lowest terms, hence \(f(y+1)=f(y)=\frac{1}{q}\). Continue reading A function continuous at all irrationals and discontinuous at all rationals→
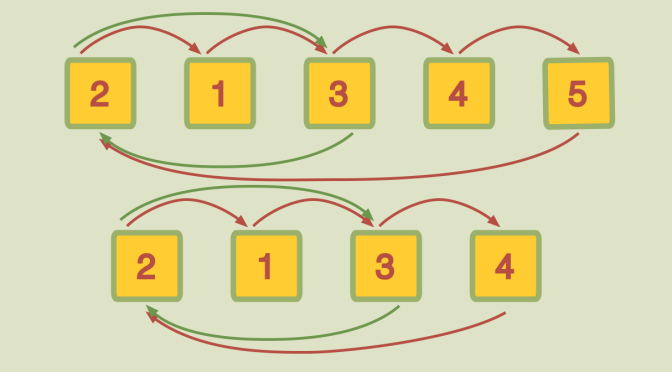
Can the symmetric group \(\mathcal{S}_n\) be generated by any transposition and any \(n\)-cycle for \(n \ge 2\) integer? is the question we deal with.
We first recall some terminology:
Symmetric group
The symmetric group \(\mathcal{S}_n\) on a finite set of \(n\) symbols is the group whose elements are all the permutations of the \(n\) symbols. We’ll denote by \(\{1,\dots,n\}\) those \(n\) symbols.
Cycle
A cycle of length \(k\) (with \(k \ge 2\)) is a cyclic permutation \(\sigma\) for which there exists an element \(i \in \{1,\dots,n\}\) such that \(i, \sigma(i), \sigma^2(i), \dots, \sigma^k(i)=i\) are the only elements moved by \(\sigma\). We’ll denote the cycle \(\sigma\) by \((s_0 \ s_1 \dots \ s_{k-1})\) where \(s_0=i, s_1=\sigma(i),\dots,s_{k-1}=\sigma^{k-1}(i)\).
Transposition
A transposition is a cycle of length \(2\). We denote below the transposition of elements \(a \neq b\) by \((a \ b)\) or \(\tau_{a,b}\).
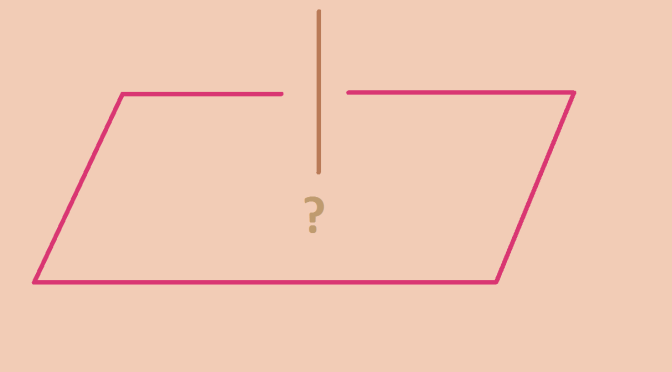
Let’s investigate the following question: “Is the distance between a point and a hyperplane always reached?”
In order to provide answers to the question, we consider a normed vector space \((E, \Vert \cdot \Vert)\) and a hyperplane \(H\) of \(E\). \(H\) is the kernel of a non-zero linear form. Namely, \(H=\{x \in E \text{ | } u(x)=0\}\).
The case of finite dimensional vector spaces
When \(E\) is of finite dimension, the distance \(d(a,H)=\inf\{\Vert h-a \Vert \text{ | } h \in H\}\) between any point \(a \in E\) and a hyperplane \(H\) is reached at a point \(b \in H\). The proof is rather simple. Consider a point \(c \in H\). The set \(S = \{h \in H \text{ | } \Vert a- h \Vert \le \Vert a-c \Vert \}\) is bounded as for \(h \in S\) we have \(\Vert h \Vert \le \Vert a-c \Vert + \Vert a \Vert\). \(S\) is equal to \(D \cap H\) where \(D\) is the inverse image of the closed real segment \([0,\Vert a-c \Vert]\) by the continuous map \(f: x \mapsto \Vert a- x \Vert\). Therefore \(D\) is closed. \(H\) is also closed as any linear subspace of a finite dimensional vector space. \(S\) being the intersection of two closed subsets of \(E\) is also closed. Hence \(S\) is compact and the restriction of \(f\) to \(S\) reaches its infimum at some point \(b \in S \subset H\) where \(d(a,H)=\Vert a-b \Vert\). Continue reading Distance between a point and a hyperplane not reached→
From the mean value theorem, a real function whose derivative is strictly positive at every point of an interval is strictly increasing. In particular, a continuously differentiable function \(f\) defined in a non-degenerate interval \(I\) with a strictly positive derivative at a point \(a\) of the interval is strictly increasing near that point. For the proof, we just have to notice that as \(f^\prime\) is continuous and \(f^\prime(a) > 0\), \(f^\prime\) is strictly positive within an interval \(J \subset I\) containing \(a\). By the mean value theorem, \(f\) is strictly increasing on \(J\).
We now suppose that \(f\) is differentiable on an interval \(I\) containing \(0\) with \(f^\prime(0)>0\). For \(x>0\) sufficiently close to zero we have \(\displaystyle \frac{f(x)-f(0)}{x-0} > \frac{f^\prime(0)}{2}>0\), hence \(f(x)>f(0)\). But that doesn’t imply that \(f\) is strictly increasing in a neighborhood of zero. Let’s prove it with a counterexample. Continue reading A function whose derivative at 0 is one but which is not increasing near 0→
In this article, we consider a group \(G\) and two subgroups \(H\) and \(K\). Let \(HK=\{hk \text{ | } h \in H, k \in K\}\).
\(HK\) is a subgroup of \(G\) if and only if \(HK=KH\). For the proof we first notice that if \(HK\) is a subgroup of \(G\) then it’s closed under inverses so \(HK = (HK)^{-1} = K^{-1}H^{-1} = KH\). Conversely if \(HK = KH\) then take \(hk\), \(h^\prime k^\prime \in HK\). Then \((hk)(h^\prime k^\prime)^{-1} = hk(k^\prime)^{-1}(h^\prime)^{-1}\). Since \(HK = KH\) we can rewrite \(k(k^\prime)^{-1}(h^\prime)^{-1}\) as \(h^{\prime \prime}k^{\prime \prime}\) for some new \(h^{\prime \prime} \in H\), \(k^{\prime \prime} \in K\). So \((hk)(h^\prime k^\prime)^{-1}=hh^{\prime \prime}k^{\prime \prime}\) which is in \(HK\). This verifies that \(HK\) is a subgroup. Continue reading Two subgroups whose product is not a subgroup→
In that article, I gave examples of real valued functions defined on \((0,+\infty)\) that converge to zero and whose derivatives diverge. But those functions were not monotonic. Here I give an example of a decreasing real valued function \(g\) converging to zero at \(+\infty\) and whose derivative is unbounded.
We first consider the polynomial map:
\[P(x)=(1+2x)(1-x)^2=1-3x^2+2x^3\] on the segment \(I=[0,1]\). \(P\) derivative equals \(P^\prime(x)=-6x(1-x)\). Therefore \(P\) is decreasing on \(I\). Moreover we have \(P(0)=1\), \(P(1)=P^\prime(0)=P^\prime(1)=0\) and \(P^\prime(1/2)=-3/2\). Continue reading A decreasing function converging to zero whose derivative diverges (part2)→
We consider a vector space \(V\) of dimension \(2\) over a field \(\mathbb{K}\). The matrix:
\[A=\left( \begin{array}{cc}
0 & 1 \\
0 & 0 \end{array} \right)\] has several wonderful properties!
Only zero as eigenvalue, but minimal polynomial of degree \(2\)